Yapay Zeka ve Otonom Sistemler Araştırma Grubu
Grup çalışmalarımız, otonom sistemlerin algı–planlama–kontrol döngüsünü uçtan uca ele alarak güvenli çeviklik, müfredat (curriculum) öğrenmesi ve self-play gibi modern öğrenme paradigmalarını simülasyon altyapılarıyla birleştirir.
Genel Bakış
Otonom sistemlerin gerçek dünyadaki performansı; algının güvenilirliğine, belirsizlik altında karar vermeye ve öğrenme sürecinin doğru yapılandırılmasına bağlıdır. Bu çerçevede, araştırma konularımızı daha genel başlıklarda topluyor ve ilgili yayınları her başlık altında listeliyoruz.
Araştırma Konuları
1) Belirsizlik Altında Güvenli Otonomi (Robustness & Risk-Aware Autonomy)
Algı bozulmaları ve model belirsizlikleri altında güvenlik–performans dengesi; hata kestirimi, risk-duyarlı karar verme ve dayanıklı planlama yaklaşımları.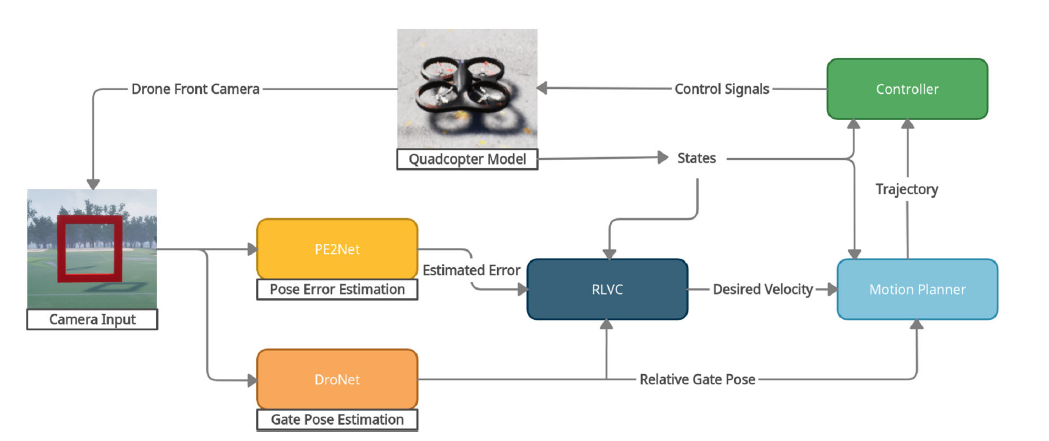
Figür 1: Önerilen sistem akışı: ön kamera girdisinden DroNet (kapı pozu) ve PE2Net (poz hata kestirimi); RLVC ile hız komutu üretimi ve hareket planlayıcıya entegrasyon.
2) Örnek-Verimli Pekiştirmeli Öğrenme (Sample-efficient Reinforcement Learning)
Seyrek ödüllü görevlerde öğrenmeyi hızlandırmak için otomatik zorluk ayarı, görev parametreleme ve müfredat (curriculum) üretimi.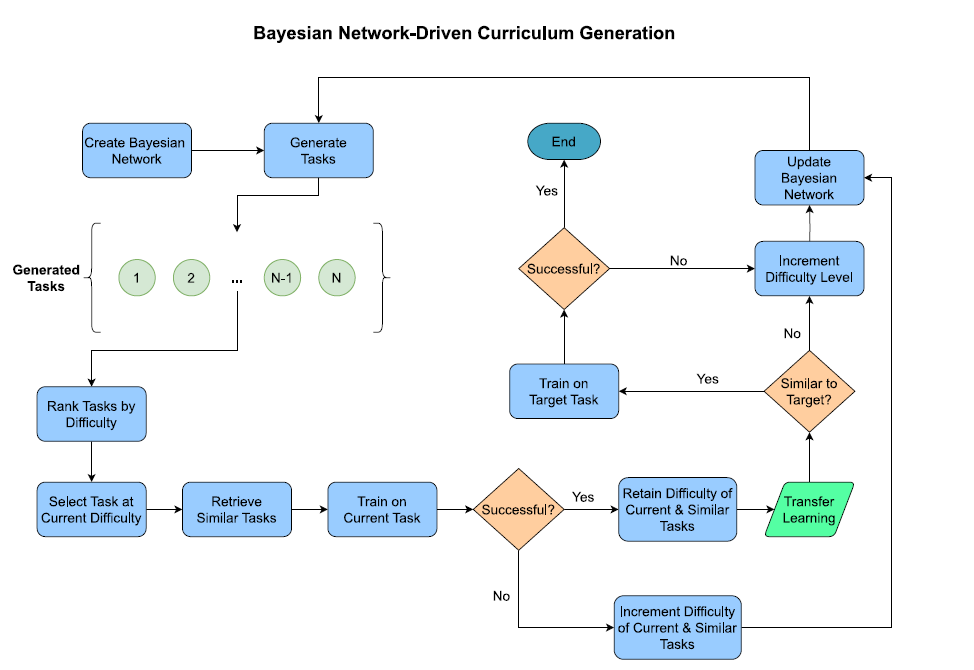
Figür 2: Bayesyen ağ güdümlü curriculum learning akışı: görevleri üret, sırala, eğit; başarıya göre zorluğu artır ve müfredatı güncelle.
3) Rekabetçi Yarış Ortamları ve Otonom Yarış Sistemleri (Drone Racing / Agile Robotics)
a.) Öz-rekabet ile öğrenme (Self-Play Learning)
Self-play ile zorluğu otomatik artırma, rakibe uyumlanma ve rekabetçi davranışların ortaya çıkması; çok ajanlı yarış senaryoları.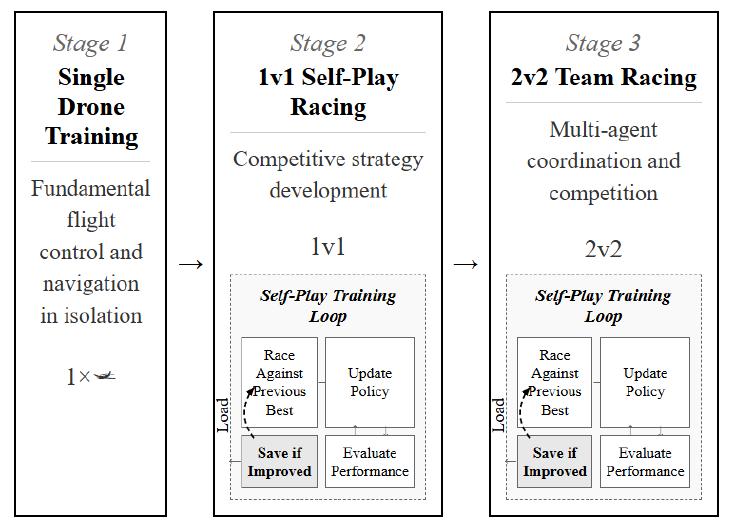
Figür 3: SPIRAL: önce temel kontrol, ardından self-play döngüsüyle 1v1’den 2v2 takım yarışına kademeli geçiş.
Non-stationarity ve ölçeklenebilirlik sorunlarını azaltmak için iteratif self-play, donmuş rakip havuzları ve müfredat tabanlı eğitim protokolleri.
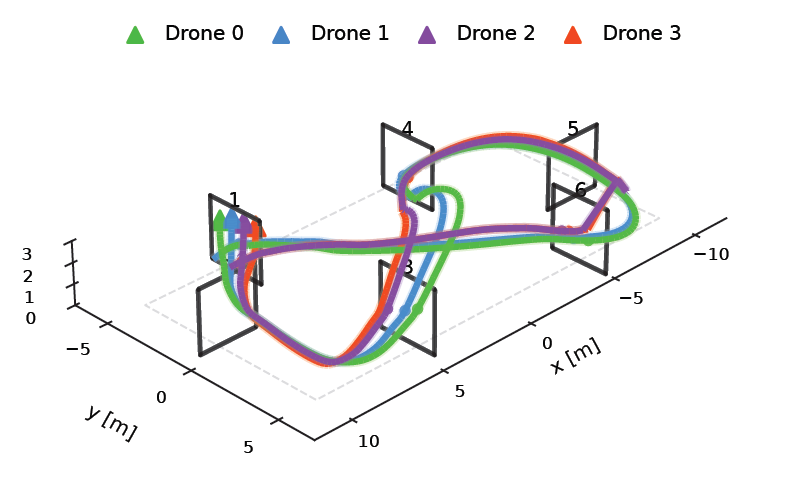
Figür 4: CRUISE ile eğitilmiş dört drone’un Sekiz (Figure‑Eight) pistindeki örnek yörüngeleri (6 kapı, kesişen döngüler)
Yayınlar
- Trading-Off Safety with Agility Using Deep Pose Error Estimation and Reinforcement Learning for Perception-Driven UAV Motion Planning
- Bayesian Curriculum Generation in Sparse Reward Reinforcement Learning Environments
- SPIRAL: Self-Play Incremental Racing Algorithm for Learning in Multi-Drone Competitions
- CRUISE: Curriculum-Based Iterative Self-Play for Scalable Multi-Drone Racing
İletişim
Arş. Gör. Dr. Onur Akgün
